综述
归一化层,目前主要有这几个方法,Batch Normalization(2015年)、Layer Normalization(2016年)、Instance Normalization(2017年)、Group Normalization(2018年)、Switchable Normalization(2018年)
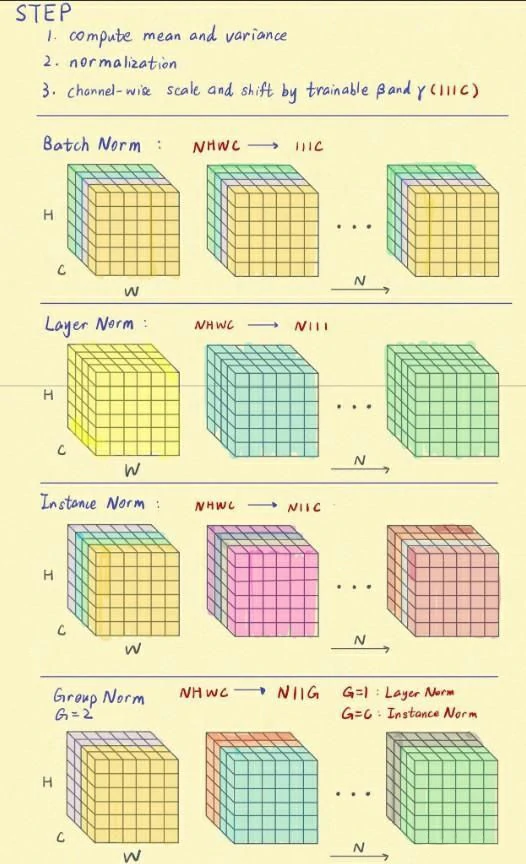
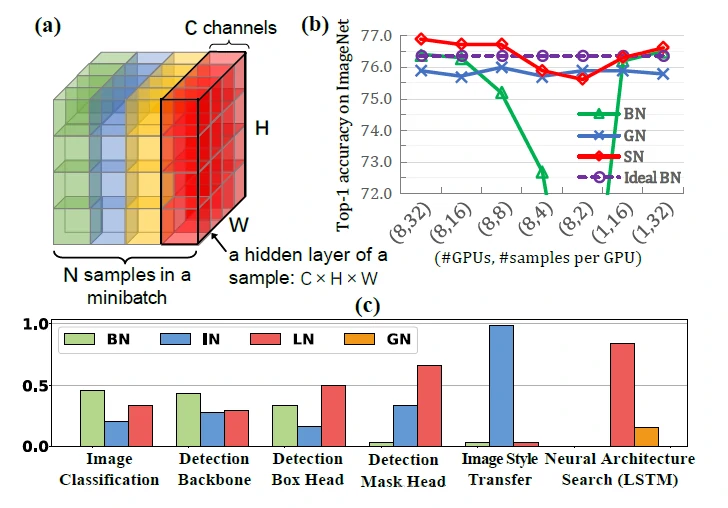
将输入的图像 shape 记为 [N, C, H, W],这几个方法主要的区别就是在:
- BatchNorm是在 batch 上,对 NHW 做归一化,就是对每个单一通道输入进行归一化,这样做对小 batchsize 效果不好
- LayerNorm在通道方向上,对 CHW 归一化,就是对每个深度上的输入进行归一化,主要对 RNN 作用明显
- InstanceNorm在图像像素上,对 HW 做归一化,对一个图像的长宽即对一个像素进行归一化,用在风格化迁移
- GroupNorm将 channel 分组,有点类似于 LN,只是 GN 把 channel 也进行了划分,细化,然后再做归一化
- SwitchableNorm是将 BN、LN、IN 结合,赋予权重,让网络自己去学习归一化层应该使用什么方法
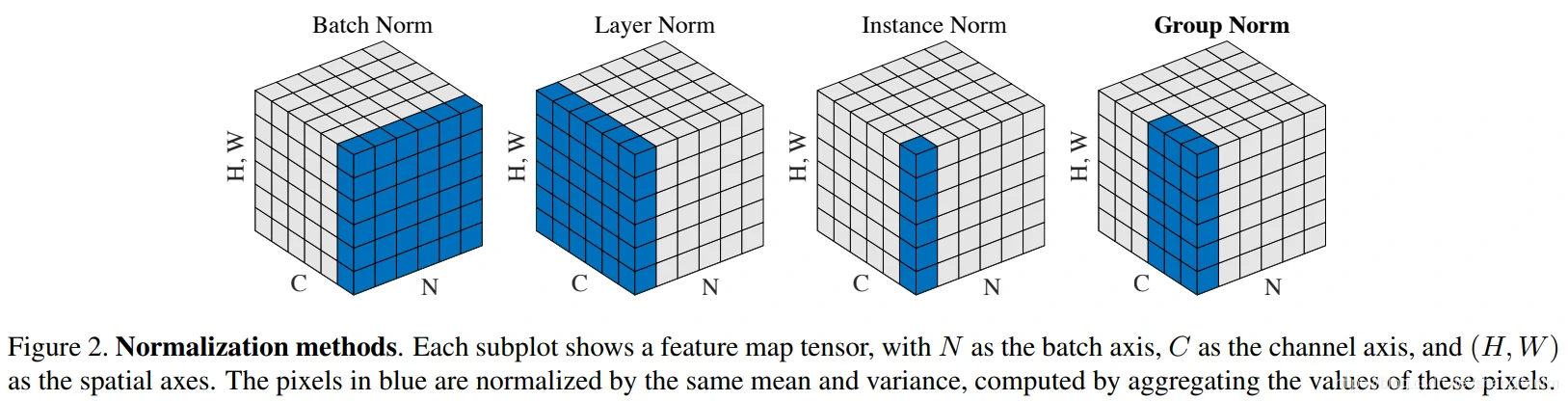
- 图中每一个正方体块表示一个数据(比如说这里一个正方体就是一个图像)
- 每一个正方体中的C, H, W分别表示channel(通道个数), height(图像的高), weight(图像的宽)
- Norm 的方式,如Layer Norm中NHWC->N111表示是将后面的三个进行标准化,不与 batch 有关
- 我们可以看到,后面的LayerNorm, InstanceNorm和GroupNorm这三种方式都是和 batch 是没有关系的
Batch Normalization
首先,在进行训练之前,一般要对数据做归一化,使其分布一致,但是在深度神经网络训练过程中,通常以送入网络的每一个 batch 训练,这样每个 batch 具有不同的分布;此外,为了解决 internal covarivate shift 问题,这个问题定义是随着 batch normalizaiton 这篇论文提出的,在训练过程中,数据分布会发生变化,对下一层网络的学习带来困难。
所以 batch normalization 就是强行将数据拉回到均值为 0,方差为 1 的正态分布上,这样不仅数据分布一致,而且避免发生梯度消失。
此外,internal corvariate shift和covariate shift是两回事,前者是网络内部,后者是针对输入数据,比如我们在训练数据前做归一化等预处理操作。
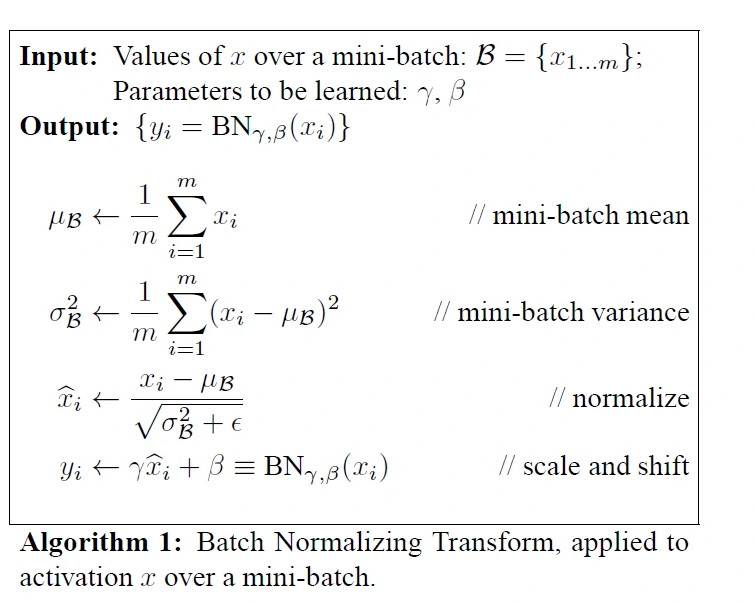
算法过程:
- 沿着通道计算每个 batch 的均值 u
- 沿着通道计算每个 batch 的方差 σ^2
- 对 x 做归一化,x’ = (x - u) / √(σ^2 + ε)
- 加入缩放和平移变量 γ 和 β ,归一化后的值,y = γx’ + β
加入缩放平移变量的原因是:保证每一次数据经过归一化后还保留原有学习来的特征,同时又能完成归一化操作,加速训练。这两个参数是用来学习的参数。
1 | import numpy as np |
Layer Normalizaiton
Batch Normalization 存在以下缺点:
- 对 batchsize 的大小比较敏感,由于每次计算均值和方差是在一个 batch 上,所以如果 batchsize 太小,则计算的均值、方差不足以代表整个数据分布
- BN 实际使用时需要计算并且保存某一层神经网络 batch 的均值和方差等统计信息,对于对一个固定深度的前向神经网络(DNN,CNN)使用 BN,很方便;但对于 RNN 来说,sequence 的长度是不一致的,换句话说 RNN 的深度不是固定的,不同的 time-step 需要保存不同的 statics 特征,可能存在一个特殊 sequence 比其他 sequence 长很多,这样 training 时,计算很麻烦。
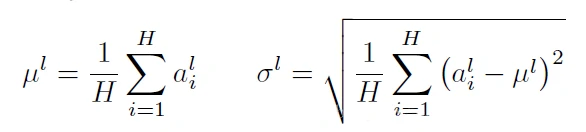
与 BN 不同,LN 是针对深度网络的某一层的所有神经元的输入按以下公式进行 normalize 操作。
BN与LN的区别在于:
- LN 中同层神经元输入拥有相同的均值和方差,不同的输入样本有不同的均值和方差;
- BN 中则针对不同神经元输入计算均值和方差,同一个 batch 中的输入拥有相同的均值和方差。
所以,LN 不依赖于 batch 的大小和输入 sequence 的深度,因此可以用于 batchsize 为 1 和 RNN 中对边长的输入 sequence 的 normalize 操作。
LN 用于 RNN 效果比较明显,但是在 CNN 上,不如 BN。
1 | def ln(x, b, s): |
用在四维图像上:
1 | def Layernorm(x, gamma, beta): |
Instance Normalization
论文:Instance Normalization
论文实现:https://github.com/DmitryUlyanov/texture_nets
BN 注重对每个 batch 进行归一化,保证数据分布一致,因为判别模型中结果取决于数据整体分布。
但是图像风格化中,生成结果主要依赖于某个图像实例,所以对整个 batch 归一化不适合图像风格化中,因而对 HW 做归一化可以加速模型收敛,并且保持每个图像实例之间的独立。
1 | def Instancenorm(x, gamma, beta): |
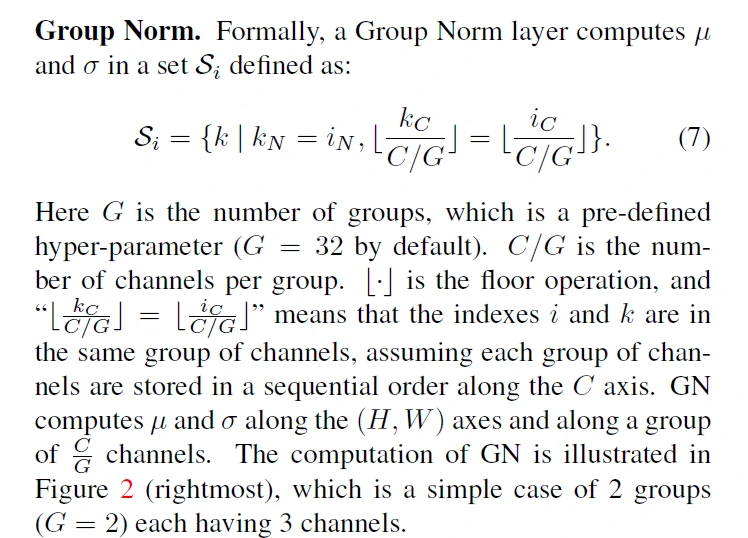
Group Normalization
主要是针对 Batch Normalization 对小 batchsize 效果差,GN 将 channel 方向分 group,然后每个 group 内做归一化,算 (C // G) * H * W 的均值,这样与 batchsize 无关,不受其约束。
1 | def GroupNorm(x, gamma, beta, G=16): |
Switchable Normalization
论文:Switchable Normalization
论文实现:https://github.com/switchablenorms/Switchable-Normalization
本篇论文作者认为:
- 归一化虽然提高模型泛化能力,然而归一化层的操作是人工设计的。在实际应用中,解决不同的问题原则上需要设计不同的归一化操作,并没有一个通用的归一化方法能够解决所有应用问题;
- 一个深度神经网络往往包含几十个归一化层,通常这些归一化层都使用同样的归一化操作,因为手工为每一个归一化层设计操作需要进行大量的实验。
因此作者提出自适配归一化方法 Switchable Normalization(SN) 来解决上述问题。与强化学习不同,SN 使用可微分学习,为一个深度网络中的每一个归一化层确定合适的归一化操作。
1 | def SwitchableNorm(x, gamma, beta, w_mean, w_var): |
在Pytorch上的实现
BatchNorm
1 | torch.nn.BatchNorm1d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) |
| 参数 | 解释 |
|---|---|
| num_features | 来自期望输入的特征数,该期望输入的大小为 batch_size x num_features [x width] |
| eps | 为保证数值稳定性(分母不能趋近或取0),给分母加上的值。默认为1e-5。 |
| momentum | 动态均值和动态方差所使用的动量。默认为0.1。 |
| affine | 布尔值,当设为true,给该层添加可学习的仿射变换参数。 |
| track_running_stats | 布尔值,当设为true,记录训练过程中的均值和方差。 |
实现公式:
LayerNorm
1 | torch.nn.LayerNorm(normalized_shape, eps=1e-05, elementwise_affine=True) |
| 参数 | 解释 |
|---|---|
| normalized_shape | 输入尺寸 [∗×normalized_shape[0] × normalized_shape[1] × … × normalized_shape[−1]] |
| eps | 为保证数值稳定性(分母不能趋近或取0),给分母加上的值。默认为1e-5。 |
| elementwise_affine | 布尔值,当设为true,给该层添加可学习的仿射变换参数。 |
实现公式:
InstanceNorm
1 | torch.nn.InstanceNorm1d(num_features, eps=1e-05, momentum=0.1, affine=False, track_running_stats=False) |
| 参数 | 解释 |
|---|---|
| num_features | 来自期望输入的特征数,该期望输入的大小为 batch_size x num_features [x width] |
| eps | 为保证数值稳定性(分母不能趋近或取0),给分母加上的值。默认为1e-5。 |
| momentum | 动态均值和动态方差所使用的动量。默认为0.1。 |
| affine | 布尔值,当设为true,给该层添加可学习的仿射变换参数。 |
| track_running_stats | 布尔值,当设为true,记录训练过程中的均值和方差。 |
实现公式:
GroupNorm
1 | torch.nn.GroupNorm(num_groups, num_channels, eps=1e-05, affine=True) |
| 参数 | 解释 |
|---|---|
| num_groups | 需要划分为的groups |
| num_features | 来自期望输入的特征数,该期望输入的大小为 batch_size x num_features [x width] |
| eps | 为保证数值稳定性(分母不能趋近或取0),给分母加上的值。默认为1e-5。 |
| momentum | 动态均值和动态方差所使用的动量。默认为0.1。 |
| affine | 布尔值,当设为true,给该层添加可学习的仿射变换参数。 |
实现公式:
总结
类似情况
- 当 GroupNorm 中group的数量是 1 的时候,是与 LayerNorm 是等价的
- InstanceNorm 等价于当 GroupNorm 时 num_groups 的数量等于 num_channel 的数量
每一种方式适合的场景
- BatchNorm 是在 batch 上,对小 batchsize 效果不好
- LayerNorm 在通道方向上,主要对 RNN 作用明显
- InstanceNorm 在图像像素上,用在风格化迁移
- GroupNorm 将 channel 分组,然后再做归一化, 在 batchsize < 16 的时候, 可以使用这种归一化
参考资料
https://blog.csdn.net/shanglianlm/article/details/85075706
https://zhuanlan.zhihu.com/p/395855181
https://blog.csdn.net/liuxiao214/article/details/81037416