原文
ViT 论文链接:https://openreview.net/pdf?id=YicbFdNTTy
速览
思想
其实核心问题就是考虑如何把图像数据 H * W * C,序列化成一个一个词那种结构,自然就想到将图片crop成一个一个patch,假设有N个patch,维度为 p * p * C,reshape加concate一下就变成个N * p^2C,也就类似词向量。
模型结构
如下图所示:
图像转序列
将图片 H * W * C,crop成N个patch,然后在转换成N * (p^2C),同时为了避免模型结构受到patch size的影响,采用Linear project将不同flatten patchs转换成D维向量。这样的话输入图片数据就成了N*D二维矩阵就和词向量矩阵对应上了。
Position embeddings
作者用一个可学习的embedding向量去将图像位置信息加入到序列中。

learnable embedding
上图中,带*号的粉色框是一个可学习的embedding,记住Xclass,经过encoder后的结果作为整张图像的表示。之所以不用其中一个patch的embedding是因为,这种embedding不可避免带有path的信息,而新增的这个没有语义信息,能更佳反映整张图片。

输入transformer encoder
整个公式如下:
实验结果
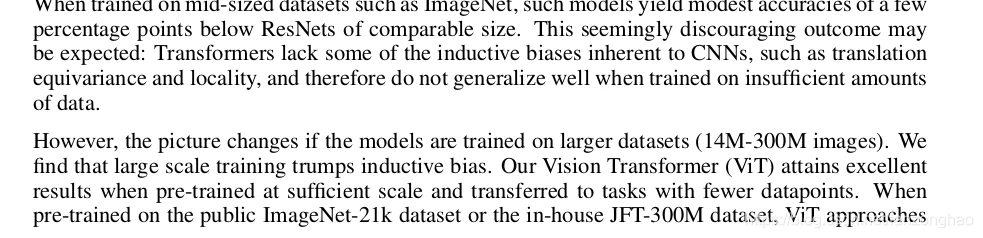
在中等数据集(例如ImageNet),效果不如resnet,但是在大规模数据集上,表现更佳。
ViT:过去一年,CV 最有影响力的工作
- 推翻了 2012 Alexnet 提出的 CNN 在 CV 的统治地位
- 有足够多的预训练数据,NLP 的 Transformer 搬运到 CV,效果很好
- 打破 CV 和 NLP 的壁垒,给 CV、多模态 挖坑
ViT效果有多好?
- CV 任务刷榜
- paperwithcode网站 霸榜 ImageNet (基于 ViT)和 COCO ,目标检测(Swin Transformer ICCV 21 best paper:多尺度的 ViT )的模型
四种情况 ViT 都能处理:
遮挡、数据分布的偏移(纹理的去除)、鸟头部+对抗的patch、图片打散重新排列组合
标题
An image is worth 16 * 16 words
每一个方格都是 16 * 16 大小,图片有很多 16 * 16 方格 patches –> an image is worth 16 * 16 words
Transformers for image recognition at scale
transformer 去做大规模的图像识别
作者来自 Google research 和 Google brain team
摘要
Transformer 在 NLP 是基本操作,i.e., BERT, GPT3, T5, 但 transformer 在 CV 的应用有限。
CV 里的 attention 是怎么用的呢?
attention + CNN, or attention 替换 CNN components 但依然保持 CNN 整体结构。
如何理解 CNN 整体结构不变?
ResNet 50 有 4 个 stages (res2 res3 res4 res5), stage 不变,attention 取代 每一个 stage 每一个 block 里的这个操作。
本文怎么看 CV 里的 attention?
attention 不用和 CNN 绑在一起,和 我 transformer 组队,在 CV 领域 大杀四方。
esp, 大规模数据集做预训练,mid-sized or small 数据集做微调,ViT SOTA
ViT fewer computational resources to train, really?
少的训练资源 == TPUv 3 + 2500 天。
“fewer” 相对来说
引言
self-attention 架构, esp Transformers,是 NLP 必选模型。主流方式是 BERT 提出的,大规模数据集预训练,在 特定领域的小数据集 做微调。 Transformer 的 计算高效和可扩展性,1000亿参数都还没有 性能饱和 的现象。
i.e., MT-N;P 5300亿参数,SOTA,也没有性能饱和的现象。
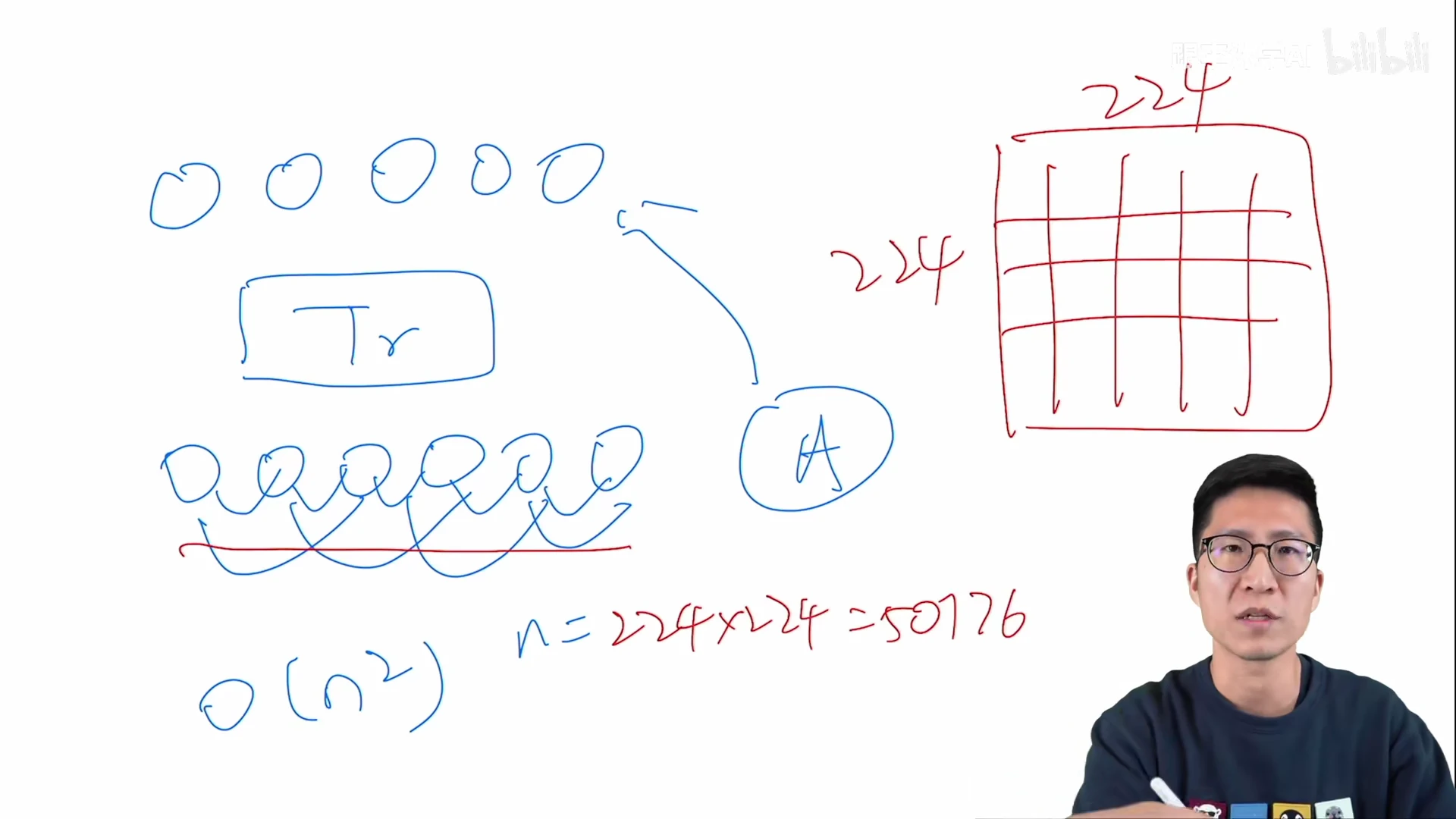
Transformer 应用在 CV 有难点吗?
计算像素的 self-attention,序列长,维度爆炸
Trnasformer 的计算复杂度是 序列长度 n 的 平方 O(n^2)
224 分辨率的图片,有 50176 个像素点,(2d 图片 flatten)序列长度是 BERT 的近 100 倍。
呼应摘要+文献:CNN 在 CV 领域 火, Transformer, self-attention 在 NLP 领域 火。CV 如何用 attention 呢?
CNN 结构 + self-attention or attention 替代卷积
CVPR Wang et al. 2018, Local Network, 网络中的特征图 输入 Transformer
ResNet 50 最后一个 stage, res4 的 feature map 14 * 14, 196
降低序列长度的方式:用特征图做 transformer 输入(Wang et al 2018), replacing the convolutions entirely (Ramachandran et al., 2019 stand-alone attention 孤立自注意力; Wang et al., 2020 axial attention 轴注意力)
stand-alone attention 孤立自注意力
用 local window 局部小窗口 控制 transformer 的计算复杂度,有点像 卷积, 卷积也有 locality,局部窗口卷积。
axial attention 轴注意力 –> 2 个 1d 顺序操作,降低计算复杂度
图片的序列长度 n = H * W
2d 矩阵 拆分为 2个1d 向量,先在 H 高度 dimension 做一次 self-attention,再 W 宽度 dimension 做一次 self-attention
replacing the convolutions entirely 好不好呢?
理论高效,但硬件无法加速 –> 此类模型都还没有太大。
本段(第二段)总结:在大规模的图像识别上,ResNet 还是效果最好的。
本文 ViT 的工作是什么?
现状:attention 已经在 CV 领域有应用,甚至也有 attention 替代卷积的操作
讲故事的角度:Inspired by the Transformer scaling 可扩展性 success in NLP, we experiment with applying a standard Transformer directly to images, with the fewest possible modifications.
标准 Transformer 直接应用于图片,做最少的修改,不做任何针对视觉任务的特定的改变。
The fewest possible modifications 是什么呢?
把图片划分成很多 patches,每个 patch 元素 是 16 * 16,序列长度 14 * 14 = 196个元素
每一个 patch 经过一个 FC layer(fully connected layer)得到一个 linear embedding,patches 的 linear embeddings 是 Transformer 的输入。
一个 224 * 224 图片 变成一个 196 个的 16 * 16 图片块(words in NLP)。
为什么 transformer 的训练是 supervised fashion?
NLP 的 Transformer 无监督训练 by language model LM or mask language model MLM;CV 任务的 benchmark 使用有监督训练。
ViT 把 CV 任务当成 NLP 任务,模型使用的是 BERT, Transformer encoder 简洁框架。Transformer 在视觉也有很好的效果。
Transformer in CV,之前有人做吗?
ICLR 2020 从输入图片里抽取 2 * 2 patches。 2 * 2 size enough:CIFAR-10 32 * 32 图片,16 * 16 会过大。 抽好 patch 之后,在 patches 上 做 self-attention。 –> 技术上的 Vision Transformer
ViT 和 ICLR 2 * 2 patches 的区别?
- ViT证明了 大规模数据集预训练 (NLP 常用)之后的 Transformer,不需要做 针对视觉任务的 修改,比最好的 CNNs 效果差不多 or 甚至更好。
- 2 * 2 patches applicable only to small-resolution images, ViT handles medium-resolution images as well.
- ViT 告诉大家,Transformer 在 vision 领域能拓展到有多好。large 数据集 + large 模型,transformer 能否取代 CNN 地位?
引言的最后:
最想说的结论 or 最想展示的结果:卖点,不用看完整篇论文,就知道此篇论文的贡献。
ViT 任何情况都很强吗?
No
mid-sized datasets ImageNet without strong regularization,ViT 比 ResNet of comparable size 弱几个点。
Why 弱? expected
Transformer 比 CNN 少 inductive biases 归纳偏置
inductive biases 归纳偏置:先验知识 or 提前的假设
CNN 的 inductive biases 是 locality 和 平移等变性 translation equaivariance(平移不变性 spatial invariance)。
locality: CNN用滑动窗口在图片上做卷积。假设是图片相邻的区域有相似的特征。i.e., 桌椅在一起的概率大,距离近的物品 相关性越强。
translation equaivariance:f(g(x)) = g(f(x))
f 和 g 函数的顺序不影响结果。
f:卷积 g:平移; 无论先做平移 g 还是先做卷积 f , 最后结果一样。
CNN 的卷积核 像一个 template 模板,同样的物体无论移动到哪里,遇到了相同的卷积核,它的输出一致。
CNN 有 locality 和 translation equivariance 归纳偏置,–> CNN 有 很多先验信息 –> 需要较少的数据去学好一个模型。
Transformer 没有这些先验信息,只能 从图片数据里,自己学习对 视觉世界 的感知。
怎么验证 Transformer 无 inductive bias 的假设?
在 1400万(ImageNet-21K) - 3000 万(JFT-300)得到图片数据集上预训练 trumps inductive bias, ViT +足够训练数据,CV SOTA。
VTAB 融合了 19 个数据集,检测模型的稳健性,ViT的 robustness 也很好。
引言总结:
第一段:Transformer 在 NLP 扩展的很好,没有因为大模型和大数据集而饱和,performance 一直有提升,Transformer 在 CV 里能不能也有大幅度的提升呢?
第二段:前人工作。这么好的 idea 有哪些人做过呢?要讲清楚自己的工作和 related works 的区别
之前的工作是 CNN + attention 或者 attention 替代 convolutions,没有工作将 transformer 用到 CV 领域,没有得到很好的扩展效果。
第三段:Vision Transformer 是 standard Transformer with the fewest possible modifications
对图片的最少修改是什么?
图片变成 16 * 16 的像素块 patches,经过 一个 fc layer 得到的 linear embeddings 输入 transformer
ViT 融合了 CV 和 NLP 领域。
第四+五段:show 结果
足够多的数据集,ViT 能 SOTA
结论
explored the direct application of Transformers to image recognition. 直接 用 NLP 的 Transformer 来处理图片。
和其它 self-attention in CV 的工作不同:除了将图片转成 16 * 16 patches + 位置编码 之外,没有额外引入 图像特有的 inductive bias
没有图片的 inductive bias 的好处是什么?
不需要对 vision 领域的了解,不需要 domain knowledge,直接把 图片理解成 a sequence of patches, i.e., 一个句子里的很多单词。
An image is worth 16 * 16 words.
直接用 NLP 里的 Transformer encoder, simple yet scalable,大规模预训练数据集,效果非常好。
ViT 效果有多好?
image classification SOTA, relatively cheap to pre-train
ViT 没有解决的问题?
文章挖坑:新问题 or 新模型
ViT 挖坑:新模型 ViT
**future directions: **新问题 —— CV 除了 image classfication 其他的任务,行不行呢?分割、检测
DETR (Carion et al. 2020) 目标检测的力作,改变了目标检测 出框的方式。ViT 做其它 CV 任务应该效果也很好。
2020年 12 月(ViT 1.5月之后)
ViT-FRCNN 检测 detection
SETR 分割 segmentation (CVPR 论文 11.15完成写作投稿)
(3个月后)Swin Transformer 融合 Transformer 和多尺度设计
Transformer 是 CV 领域的一个通用的骨干网络 backbone
另外一个未来工作方向,自监督的预训练方式。
NLP 大的 transformer 模型使用 自监督 预训练,ViT有 initial experiments 证明 自监督预训练也可以,但和有监督的训练有差距 still large gap。
把 ViT 变得很大,would likely lead to improved performance。scaling ViT, ViT-G, ImageNet 90 +%
ViT 挖坑:
- 视觉领域 CV
- 多模态,一个 transformer 处理 CV 和 NLP
相关工作
Transformer 在 NLP 领域的应用:BERT, GPT
Transformer 先在大规模语料库上做预训练,再根据具体的任务数据集进行微调。
BERT: denosing mask挖词、完形填空,把masked的词预测出来
GPT: language modelling, 预测下一个词 next word prediction
完形填空 or 预测下一个词,人为设定。语料句子是完整的,去掉某些词(完形填空) or 最后词(预测下一个词) –> 自监督的训练方式。
self-attention 在视觉领域的应用
self-attention to each pixel:❌
224 * 224 image: O(n^2 = 50176)
1k, 4k image: 维度爆炸
self-attention to each image with approximations:
- 不用整张图,只用 local neighborhoods,降低序列长度
sparse transformer
- 全局注意力的近似
- 只对 稀疏的点 做注意力
scale attention by applying attention in blocks of varying size
- 把自注意力用到不同大小的 blocks
- in the extreme case only along individual axes 极端情况,只关心轴, axial self-attention,横轴 + 纵轴
小结:以上 self-attention + CV 效果不错,但工程实现加速很难。可在 cpu gpu跑,但大规模训练不行。
和 ViT 最相似的工作:
ICLR 2020 2 * 2 patches for CIFAR-10 32 * 32 图片
ViT 胜在哪里:更大的 patches 16 *16 + 更大的训练数据集
CV 中 检测、分类、视频处理、多模态 self-attention with CNNs
另一个相似工作:image GPT
GPT 是 NLP 的生成模型,image GPT 无监督预训练,生成模型。
image GPT 也用了 transformer 图片(降低分辨率和 color space)。用训练好的 image GPT or 直接把 image GPT 当成特征提取器, ImageNet 准确率 72%;ViT ImageNet 准确率 88.5%
ps:最近爆火的 MAE
在 BEiT 或 MAE 论文之前,生成式网络 在 CV 比 判别式网络 弱很多。
MAE 生成式模型 在 ImageNet-1k 做训练,比判别式模型好。分类 ✔,目标检测 ✔ (transfer learning)
还有其它和 ViT 相似的工作吗?
- 用比 ImageNet 还大的数据集做预训练,大力出奇迹
- Sun et al 2017 JFT-300M 数据集,CNN 的效果随数据集增加而提升
- Djolonga et al 2020 研究大数据集预训练迁移到小数据集的效果
- 在 ImageNet-21K 或 JFT-300M 数据集做预训练,迁移到 ImageNet 或 CIFAR-100 效果怎么样
本文 ViT 和这些相似论文的关系?
ViT 关注 ImageNet-21K 或 JFT-300M 数据集, 不训练 ResNet,训练 Transformer
Related work 写作总结:
方方面面相关的都写到了,也列举了非常相似的工作 ICLR 2020 2*2 patches, image GPT 生成模型,大数据集 BIT 相关的文章
Related work 目的:
让读者知道在你的工作之前,别人做了哪些工作,你跟他们的区别在哪里
related work 章节的详细不会降低论文的创新性,反而加分,让整个文章变得更简单易懂。
ViT模型
ViT 尽可能使用 original Transformer,享受 Transformer efficient implementations。
NLP 中 Transformer 很火,有很多 Transformer 的高效实现
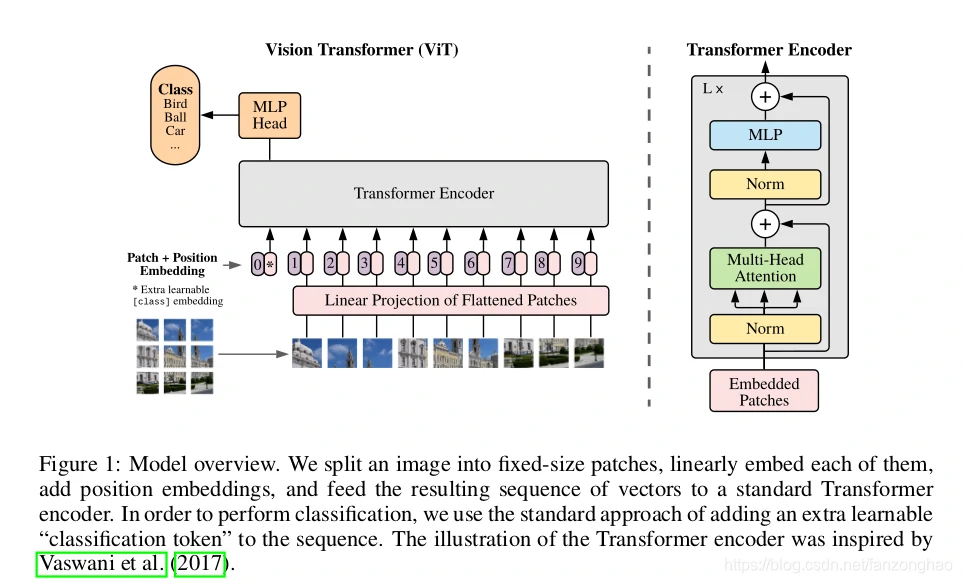
Vision Transformer 模型图
Model overview
好图:以图读论文,讲解 ViT 直接复制
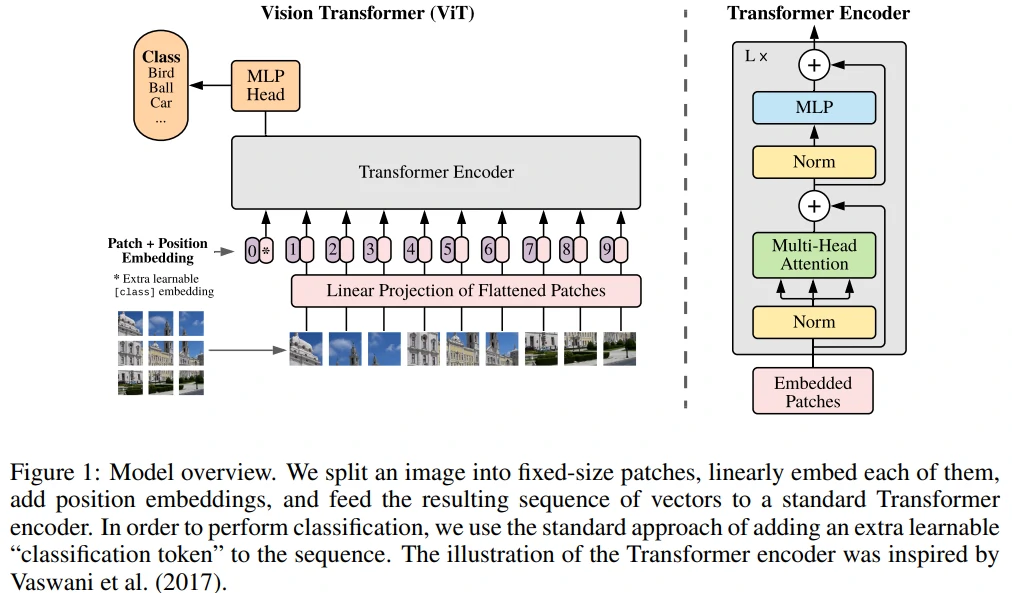
Input: 1 张图
Process: 九宫格 9 patches –> Flattened Patches (3 * 3 –> 1 * 9 拍平) –> Linear Projections —> Patch embedding
Why need position embedding?
self-attention 所有元素两两算自注意力,和顺序位置无关。但图片的 patches 是有顺序的,+ position embedding
Patch embedding + position embedding == token 包含 图片 patch 信息 和 patch 在原图中的位置信息。
ViT 对 图片的操作: 划分 patches,flatten patches 的线性投影 + patches 的位置信息,得到输入 transformer 的 tokens
得到 tokens 之后,对 visual tokens 进行 NLP 操作:
tokens 传入 Transformer encoder,得到很多输出。
Q: 每一个 token 都有输出,用哪个输出分类呢?
借鉴 BERT, extra learnable {class} embedding –>, a special classification token, * in figure 1.
也有 position embedding, 0(永远是0)
Q: Why works?self-attention O(n^2)
self-attention in transformer encoder,所有的 tokens 在做两两的交互信息。因此,也会和所有的 图片 patches 的 token 交互,从而从图片 patches + position 的 embedding 学到有用信息,最后用做分类判断。
Q: 从怎么得到最后的分类? 通用MLP Head
输入 一个通用的 MLP Head,得到 Class,cross-entropy 损失函数训练模型。
Q: ViT 用了标准的 transformer 结构,ViT的特点是什么?
图片 patches 化 + position embedding 转化为 tokens
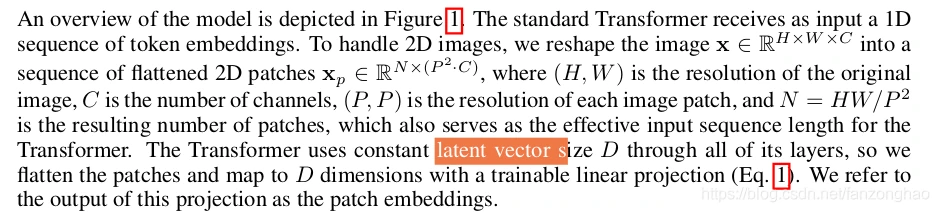
ViT 前向过程
Vision 问题 变成 NLP 问题
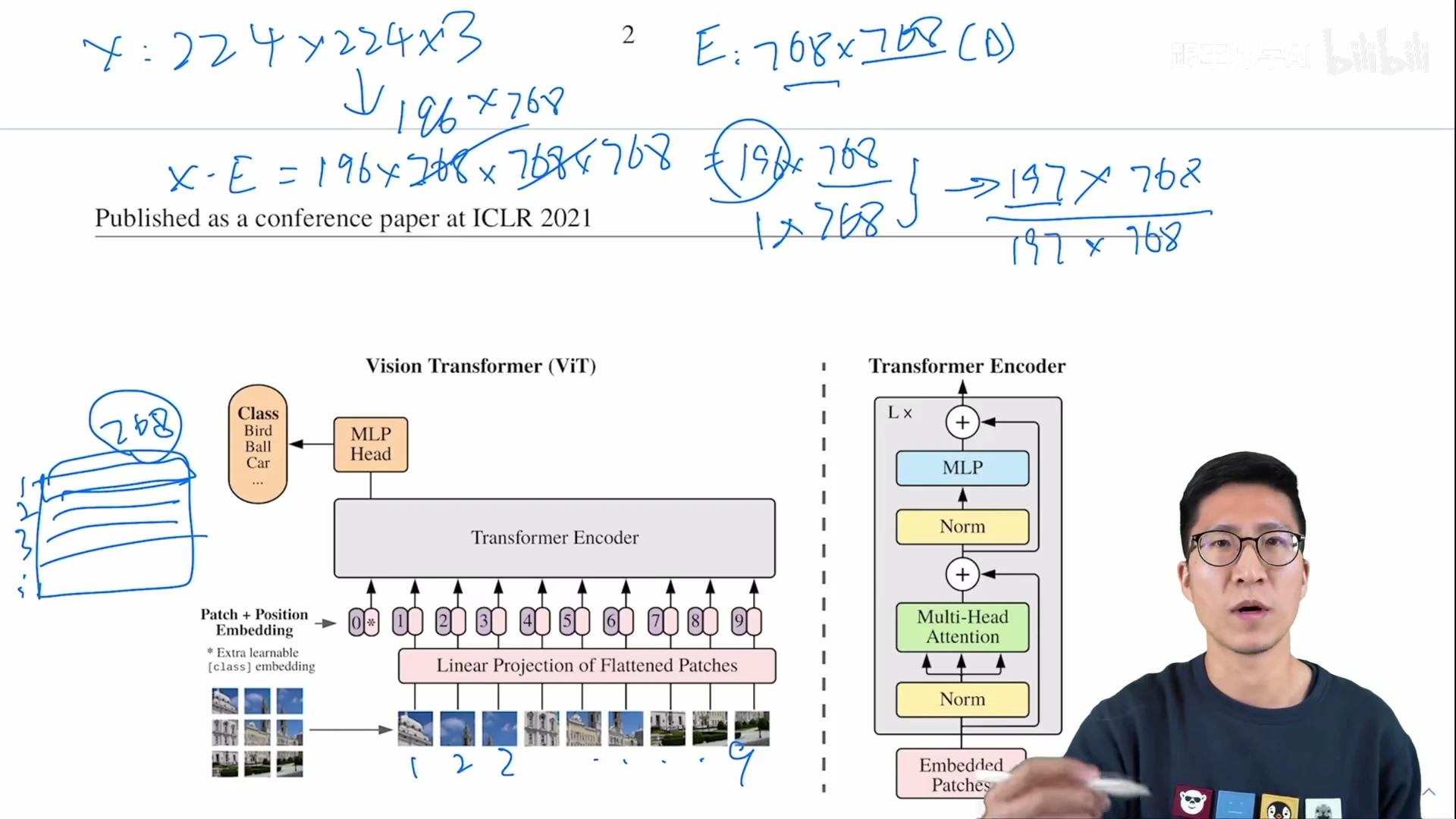
图片 X: 224 * 224 * 3 (RGB, 3 channels)
patches 数 N: 224 ^ 2 / 16 ^ 2 = 14 ^ 2 = 196
每一个 patch 的维度:16 * 16 * 3 (RGB, 3 channels) = 768
Linear Projection 全连接层 E: 768( 不变,patch 计算而来 ) * D(embedding_dim) 768 或 更大
图片 X * E = patches (196 patches 个数 * 768 每个 patch 的维度) * E ( 768 * D ) = 196 * D (768)
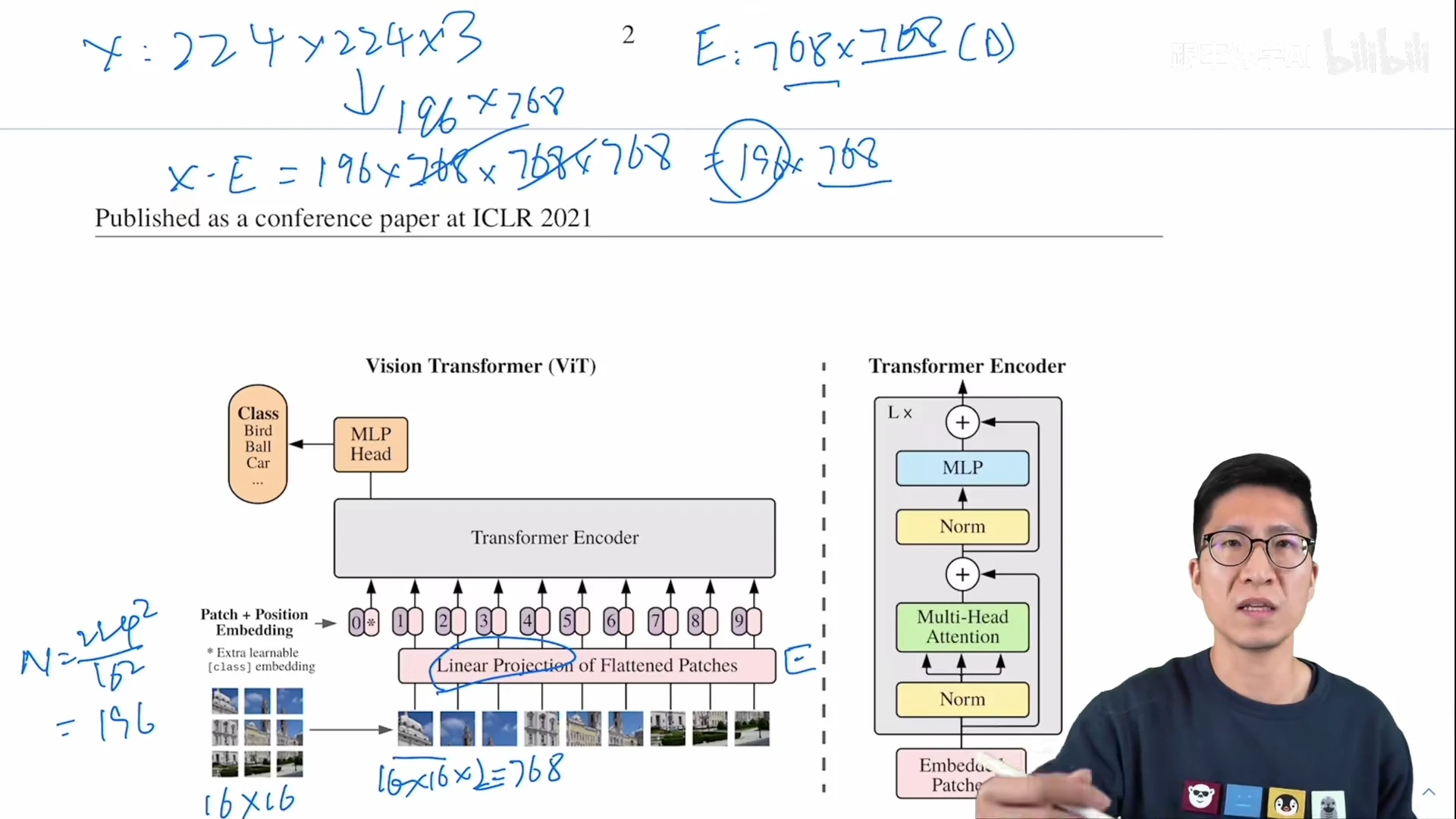
**Vision to NLP done! **
a 2d image –> a sequence 1d tokens
Q: 进入 transformer encoder 的序列长度?
196 * 768(图片对应的 tokens) 拼接 concatenate [CLS] token (1 * 768) = 197 * 768
Q: position embedding 怎么加 patch embedding?sum()
图1 的 1-9 不是真正使用的 position embedding,实际的 position embedding 表,1 - 5 行 代表 图1 的 1 - 5 值。
每行向量的维度是 1 * 768
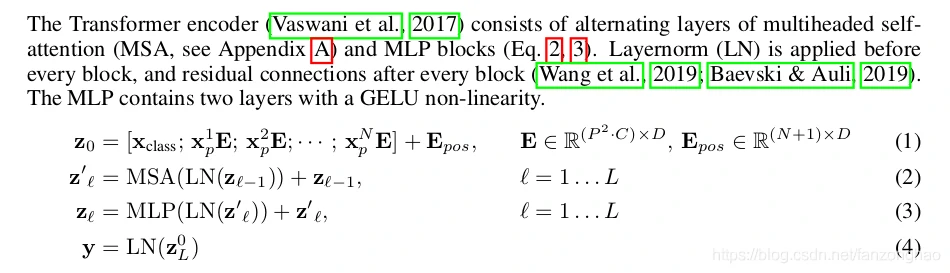
相加 sum:
patch embedding(197 * 768) + position embedding ((1 CLS + 196 patches) * 768)= (197 * 768)
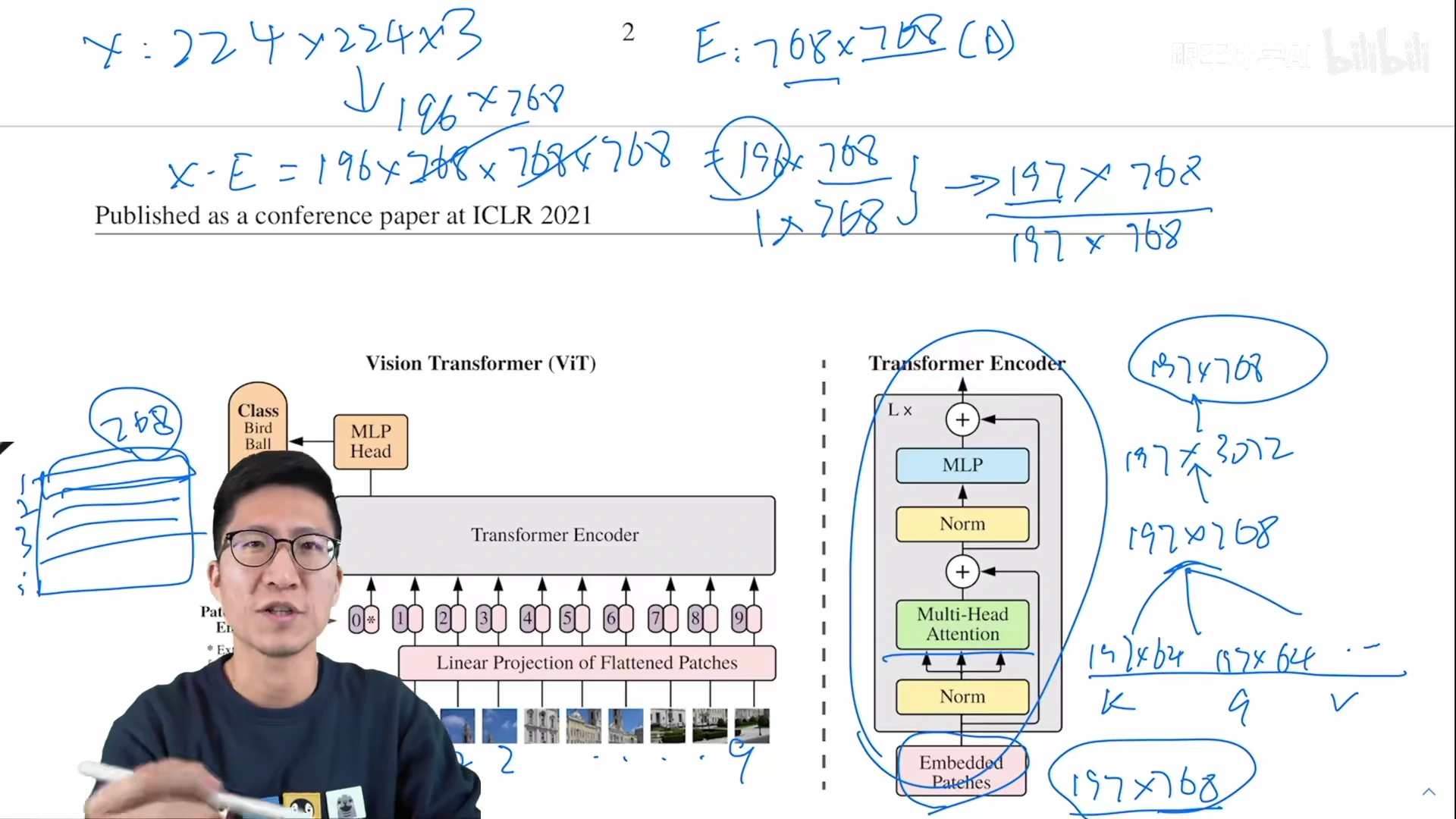
ViT base: 12 heads
MLP:放大 4 倍,再缩小到原维度大小
Transfomer encoder 输入输出维度一致,可以直接叠加 L 个
Vision Transformer正文
公式的具体值计算,参考上一小节。
有了具体含义的公式字符,也不那么可怕了呢 o( ̄▽ ̄)ブ
ViT 用的是 BERT 1d position embedding,图片 2d aware position embedding 结果也差不多。
D.3 Head type and class token 作者的消融实验
ViT 除了标准的 transformer,关键部分是 怎么对图片进行预处理 和 怎么对图片最后的输出进行后处理。
class token:证明 标准的 transformer 做视觉,没问题!
控制和 NLP 的差异:使用 BERT 的 CLS,CLS 在 NLP 理解为 一个全局的对句子理解的特征;ViT 的 CLS 理解为 一个图像的整体特征。
CLS token + MLP (tanh acitvation) == 分类
CV 通常的 全局特征:i.e., Res50
feature map (14 * 14) –> GAP globally average-pooling 全局平均池化 –> a flatten vector 全局的图片特征向量 –> MLP 分类
类似的,Transformer 的 输出元素 + GAP 可以用做全局信息 + 分类吗? Ok
CV 的 CLS GAP 和 NLP 的 CLS 效果差异不大。
CLS-Token 和 GAP 的 适用参数 不一样。
位置编码: 1d 2d relative 无所谓
1d:NLP 1, 2, 3, …, 9 D
2d:D / 2 * D / 2
11 12 13
21 22 23
31 32 33
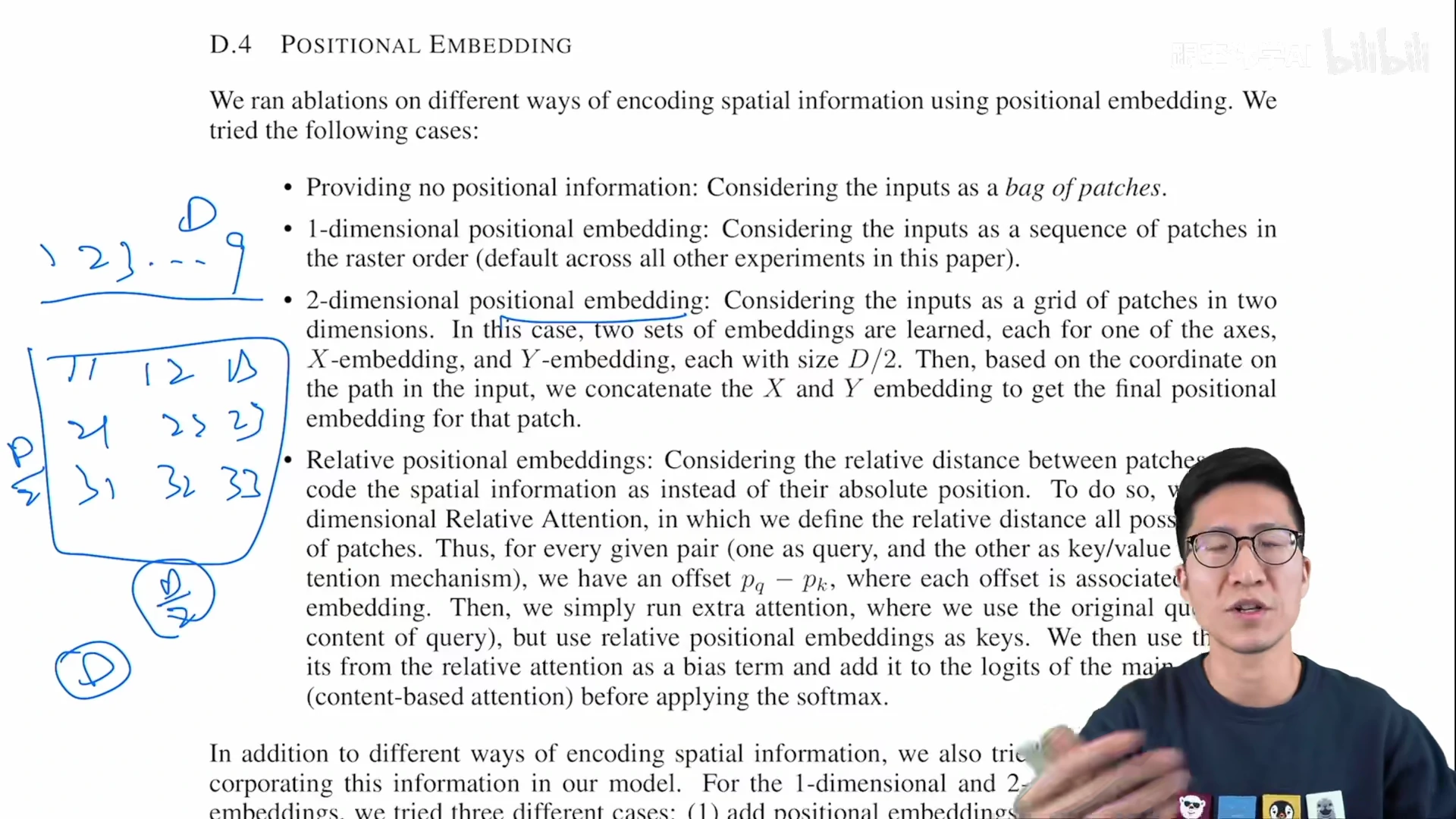
relative: offset
绝对距离转相对距离,1 - 9 和 -4, …, 0, …, 4
为啥都是 0.64 左右,无所谓?
ViT 直接作用于 14 * 14 patches,而不是 224 * 224 像素。较少数量的 patches 之间的相对位置信息,容易学到。
ViT 正文 CLS continued
CLS 可用 GAP global average pooling 替换
1d position embedding 可用 2d or relative 替换
ViT 对齐 标准的 transformer,选用 NLP 里常用的 CLS 和 1d position embedding
Appendix: Transformer multi-head 解释,i.e., 卷积解释 in CNN papers
公式总结 ViT 的前向传播过程
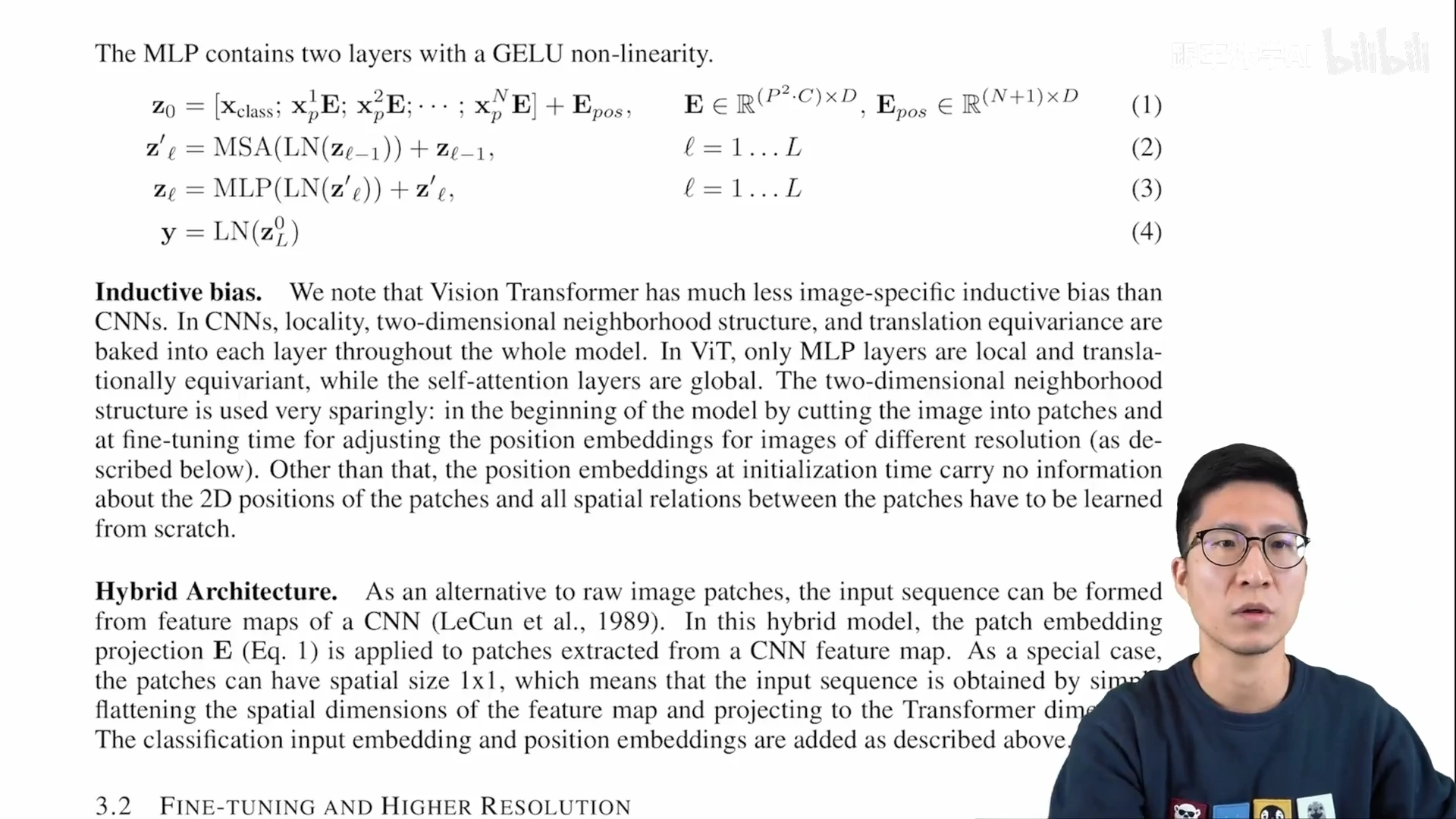
Inductive bias
CNN 的 inductive bias: locality 局部性, translation equivalence 平移等变性。在 CNN 模型每一层都有所体现,==》模型的先验知识从头到尾,贯穿整个模型。
ViT 比 CNN 的 inductive bias 少, only MLP
In ViT, only MLP layers are local and translationally equivariant, while the self-attention layers are global.
ViT 的 inductive bias in images:
图片 切成 patches;+ position embedding(随机初始化,没有携带 2d 位置信息)
ViT 的 patches 块的 2d 位置信息 + spatial relations 图像块之间的场景信息,都需要重新学。 ==》 ViT 没有很多 inductive bias ==》中小型数据集训练 ViT 效果不如 CNN
Hybrid architecture
Transformer: 全局建模能力强
CNN: data-efficient 不用那么多训练数据
前 CNN + 后 Transformer –> Hybrid archtecture
不同的图片预处理方式:不划分 patches,采用 CNN (Res50 的 feature map 14 * 14 = 196),过全连接层 E Linear projections 得到图片的 embedding
ViT 的图片预处理方式:
把一张图划分成 patches,直接过全连接层 fc
Fine-tuning and higher resolution
微调时用大图片尺寸 i.e., 256 * 256, 320 * 320 而不是 224 * 224,效果更好
Q: 预训练好的 ViT 可以在更大尺寸的图片上为条码?
if patch size 不变 16 * 16,更大尺寸的图片 –> 序列长度的增加 i.e., 14 * 14 –> 20 * 20 in 320 * 320 image
Transformer 理论上,可以处理任意长度。
But,提前训练好的 position embedding 可能失效
1 - 9 的九宫格 图片 patches 位置编码 –> patches 增多,1 - 25 位置编码
Q: patches 数增多,如何使用 已预训练好的 位置编码呢?
2d 插值,torch 的 interpolate 函数实现;但也不是任意长度增加都能保持效果。
256 –> 512 –> 768 长度的增加,直接使用差值,最后效果掉点。(采样定理)
插值 interpolate 临时解决方案,ViT 微调时的一个局限。
ViT 用了图片 2d 结构 的 inductive bias 地方:resolution adjustment 尺寸改变 和 patch extraction 抽 patches
实验
对比 ResNet, ViT, Hybrid ViT (CNN 特征图,不是图片直接 patch 化) 的 representation learning capabilities 表征学习能力。
为了了解每个模型预训练好 到底需要多少数据,在不同大小的数据集上预训练,然后在很多 benchmark tasks 做测试。
考虑模型预训练的计算成本时,ViT performs very favourably 表现很好, SOTA + fewer resource 训练时间更少
ViT 的自监督训练,可行,效果也还不错,有潜力;一年之后,MAE 用自监督训练 ViT 效果很好。
4.1 Setup
datasets:
ImageNet-1K: 1000 classes, 1.3M images
ImageNet-21K: 21000 classes, 14M images
JFG-300: 303M images Google 不开源
下游任务:分类 CFIAR etc.
Model variants
ViT Base, Large, Huge
Layers, Hidden size D, MLP size, Heads 相应增加
模型变体 = (Base, Large, Hugh) + (patch size 表示)
ViT-L/16 使用 Large 参数 和 patch 16 * 16 输入
Q: Why patch size in name of model variants?
ViT 模型的 patch size 变化时, i.e., 16 * 16 –> 32 * 32 or 8 * 8, 模型的位置编码会变化
- transformer 输入的序列长度 与 patch size 成反比
- patch size 越小,一张图片的 patches 数越多,训练越贵 because of 序列长度的增加
结果
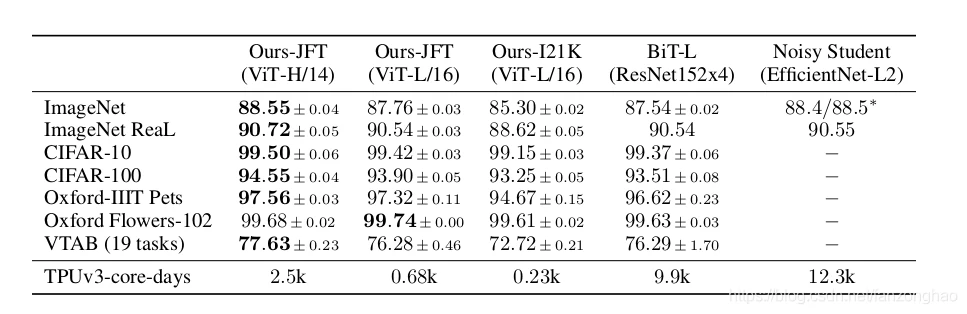
ViT-H/4 秀肌肉 刷榜
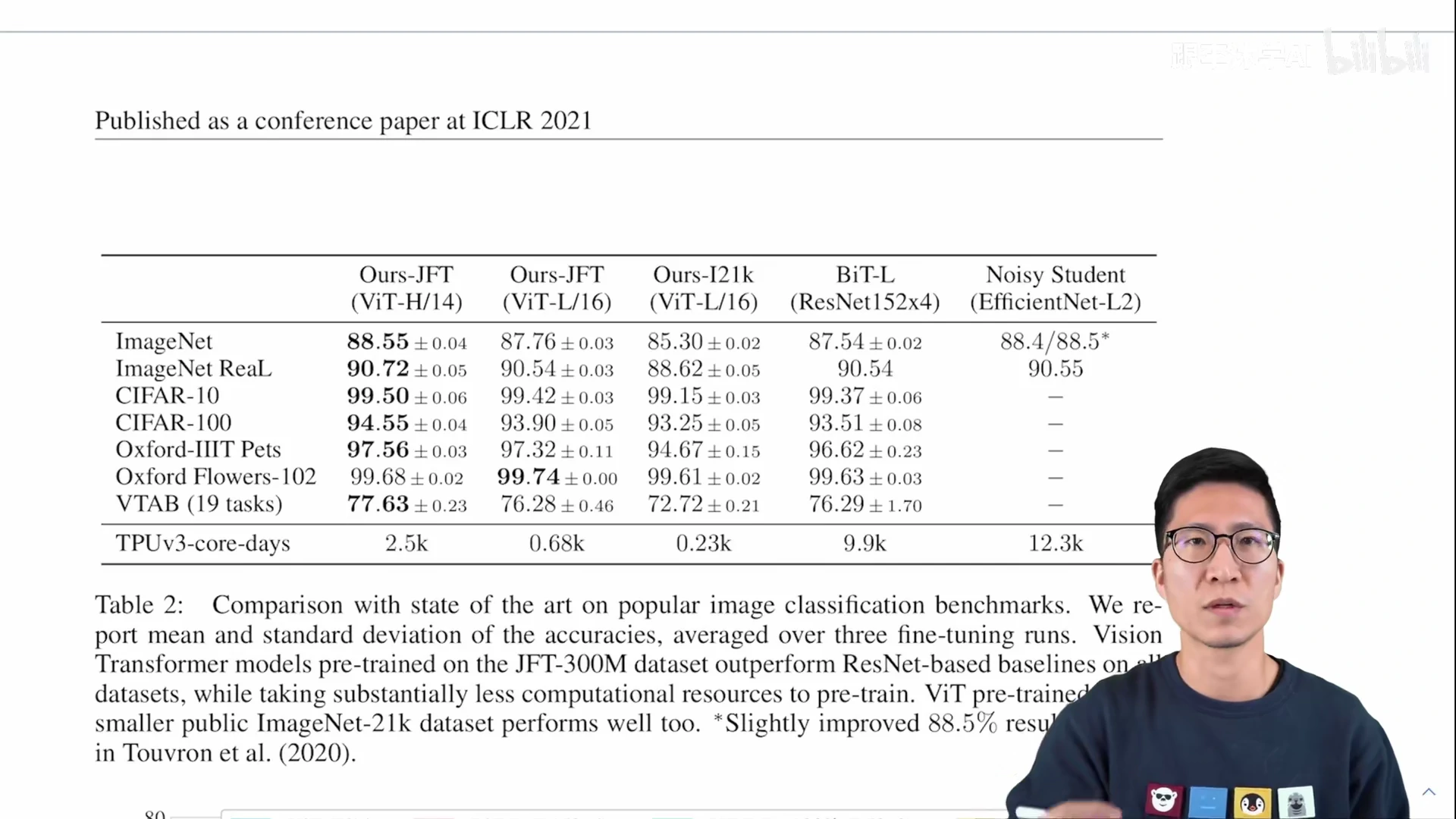
和 CNN 的工作 BiT-L, Noisy Student 做对比
BiT-L: CNN比较大的模型,ViT论文作者团队自己的工作
Noisy Student: ImageNet 当时表现最好的方法。用 伪标签 pseudo-label 去 self-training
ViT-H/14 训练比 ViT-H/16 贵,效果和 BiT-L 差不多,优势不明显。怎么突出 ViT 的好呢?
ViT 训练更便宜。TPUv3 天数:ViT-H/14 2.5K, BiT-L 9.9K, Noisy Student 12.3K
ViT 优点:效果好 + 训练快
结果分析
Vision Transformer 到底需要多少数据才能训练好?
图3 灰色区域 ResNet 的效果,圆圈 ViT 的效果
Take home message: 图 3
如果想用 ViT,至少需要 ImageNet-21K 14M 大小的数据集
- 小于整个数据量,CNN 更合适,更好的利用 inductive bias,ViT 没有特别多 inductive bias 需要更多数据训练。
数据集规模比 ImageNet-21K 更大时,Vision Transformer 效果更好,因为可扩展性 scaling 更好。
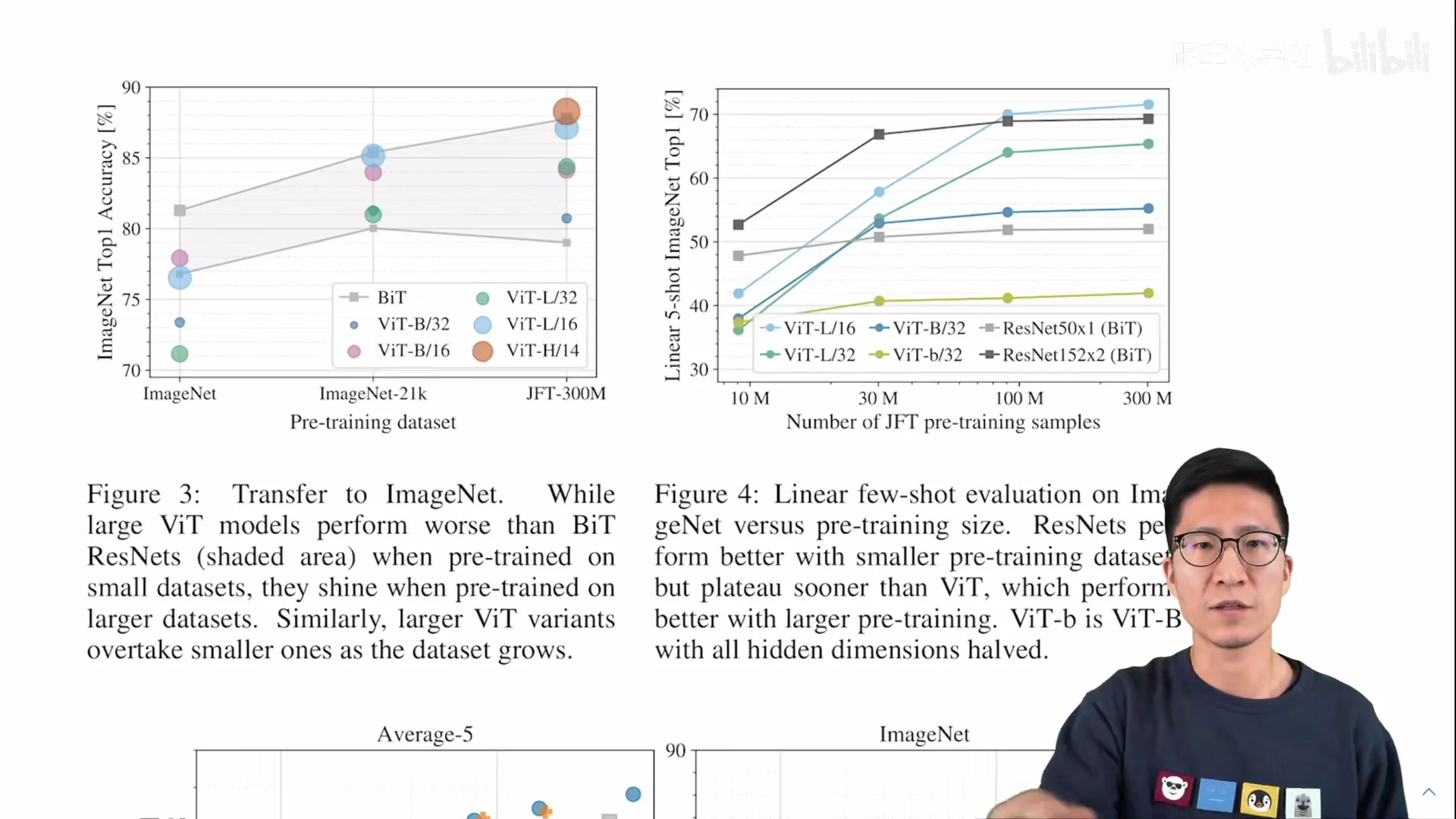
图 4 Linear few-shot evaluation
图 3 ViT 和 ResNet 比,加了强约束:dropout、weight decay、label smoothing,约束了 ViT 的发挥
linear evalution: 把 ViT 预训练好的模型 直接作为 特征提取器,不 fine-tune,+ 一个 logistic regression 得到分类结果。
Few-shot:5-shot,在 ImageNet 做 linear evaluation 时,每类图片随机选取 5 个 samples,evaluation 很快,做 消融实验。
linear few-shot evaluation 采用 JFT 数据集 10M, 30M, 100M, 300M。来自同一个数据集,数据没有 distribution gap,模型的效果更能体现 Vision Transformer 本身特质。
ViT 图4 效果 和 图3 差不多。如何用 ViT 做小样本学习,未来研究方向之一。
图 5 用 ViT 比 CNNs 便宜 的实验支持
大家的印象:Transformer 又大又贵,很难训练
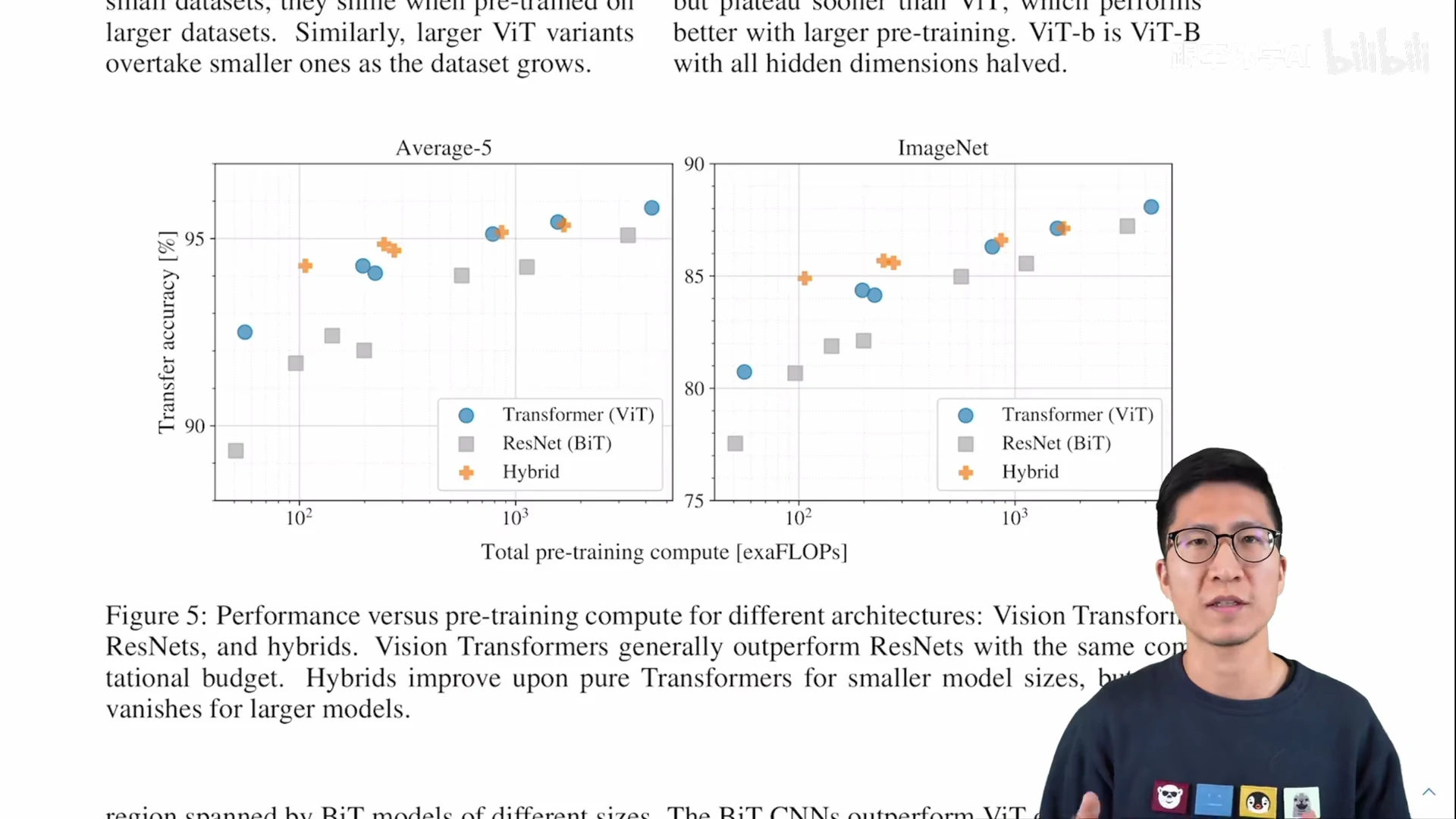
average-5:ImageNet-real, Pets, Flower, CIFAR10, CIFAR100 平均
ImageNet 单独的对比
同等计算复杂度:ViT 比 ResNet 效果好,印证了 ViT 训练更便宜
Q: Hybrid 模型,CNN 抽取出来的特征,能不能帮助 Transformer 更好的学习呢?
- 小模型,Hybrid 模型吸收 CNN 和 Transformer 的优点,效果好。不需要很多的数据预训练,达到 Transformer 的效果
- 大模型,Hybrid 模型 和 Transformer 差不多,甚至不如 Transformer 模型。Why?
如何 预处理图像,如何做 tokenization 很重要,后续论文有研究
整体趋势:模型增加,除了 Hybrid 模型有点饱和(饱和:增加到一个平台值后,不增加了)。ResNet 和 Transformer 都没有饱和。
4.5 Inspecting Vision Transformer
可视化分析 ViT 内部表征 internal representations: Patch embedding, position embedding
ViT 第一层 Linear projection E 学到了什么?
Figure 7 (left) embed RGB value 前 28 个主成分
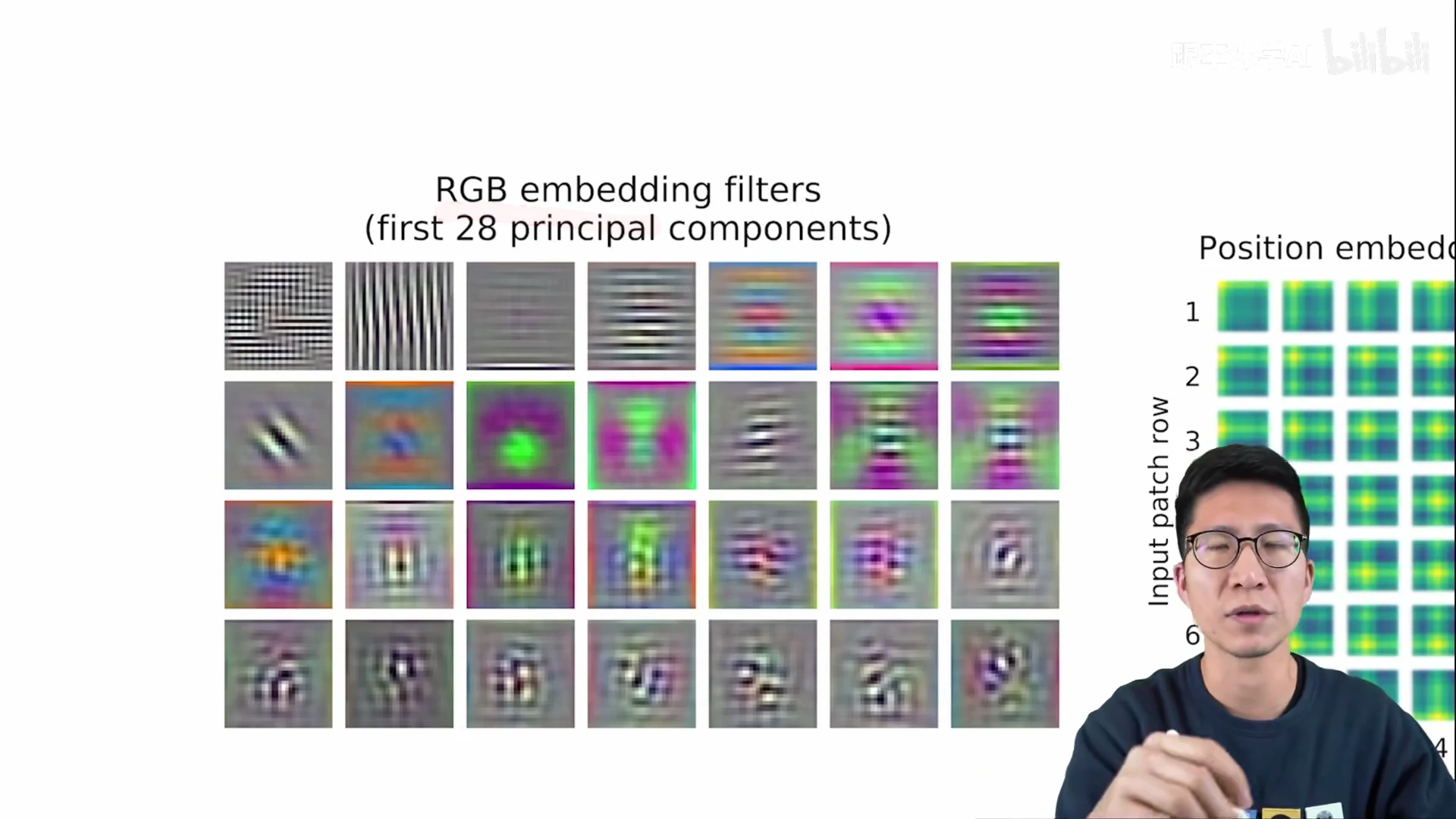
Vision Transformer 和 CNN 学到的很像,类似 gabor filter 有颜色、纹理, 可以做 plausible basis functions,可以描述每个图像块的底层信息 a low-dimensional representation of the fine structure within each patch.
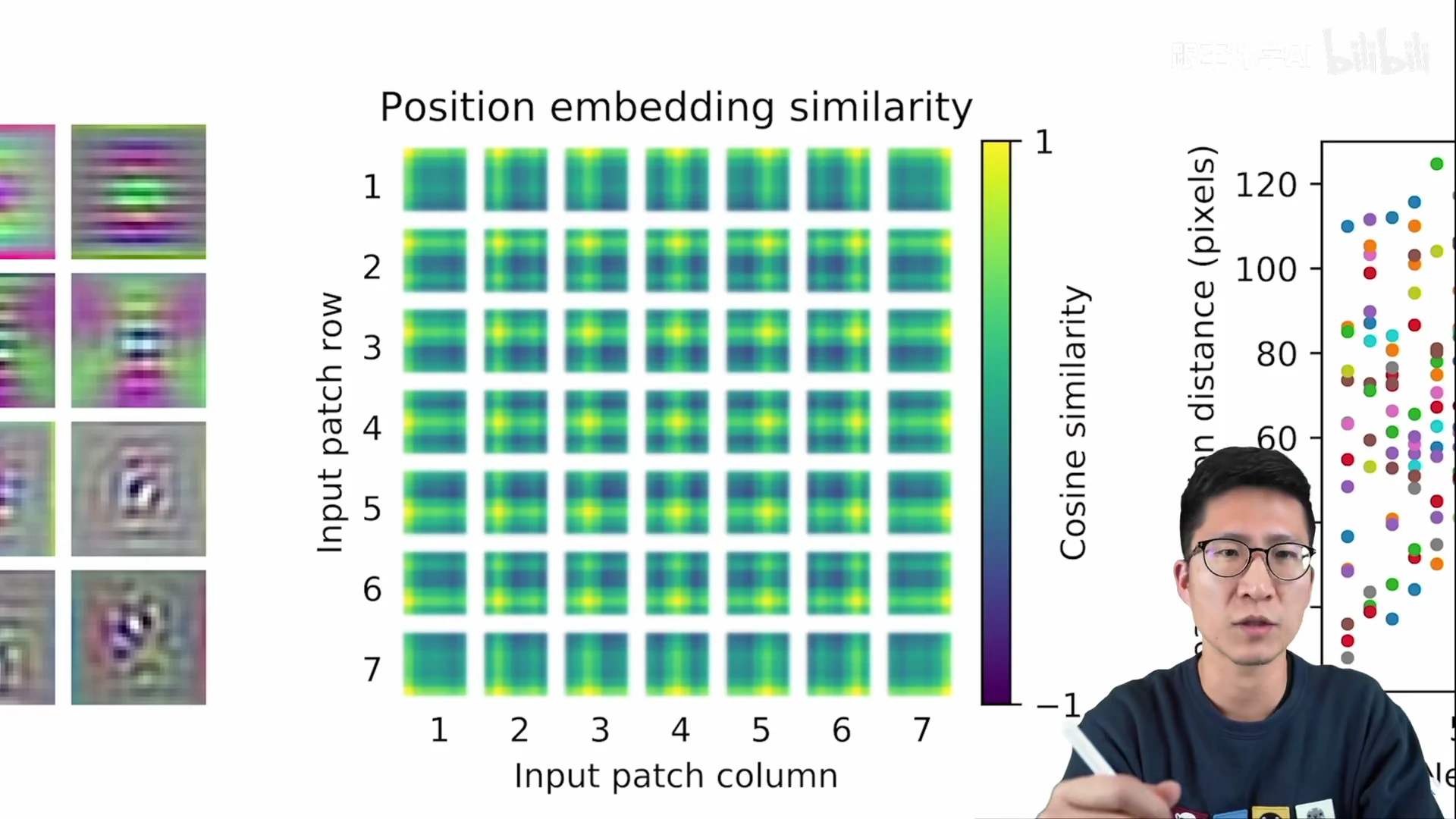
Position embedding 能学到一些表示位置距离的信息
- patch 自己本身 相似度高 黄色 1
- 学到了距离的概念
- (4, 4) 黄色中心点,越边缘,相似度越低,颜色越蓝
- 学到了 行 和 列 的距离规则
- 同行同列,颜色条 的表示
虽然是 1d 的 position embedding,但已经学到了 2d 的图像位置概念;所以换成 2d position 提升不多。
- 同行同列,颜色条 的表示
Self-attention 有没有起作用?
用 Transformer 的原因:自注意力 能模拟长距离的关系。
- NLP 一个很长的句子里,开头的一个词和结尾的一个词 可能互相有关联。
- CV 里 很远的两个像素点之间 也能做自注意力。
ViT 的 self-attention 是不是 很远的像素点也能有交互?
ViT-L/16 有 24 层(横坐标值),五颜六色的点:transformer 每层 multi-head 的heads,ViT-L 16 heads, 每一列有 16 个点
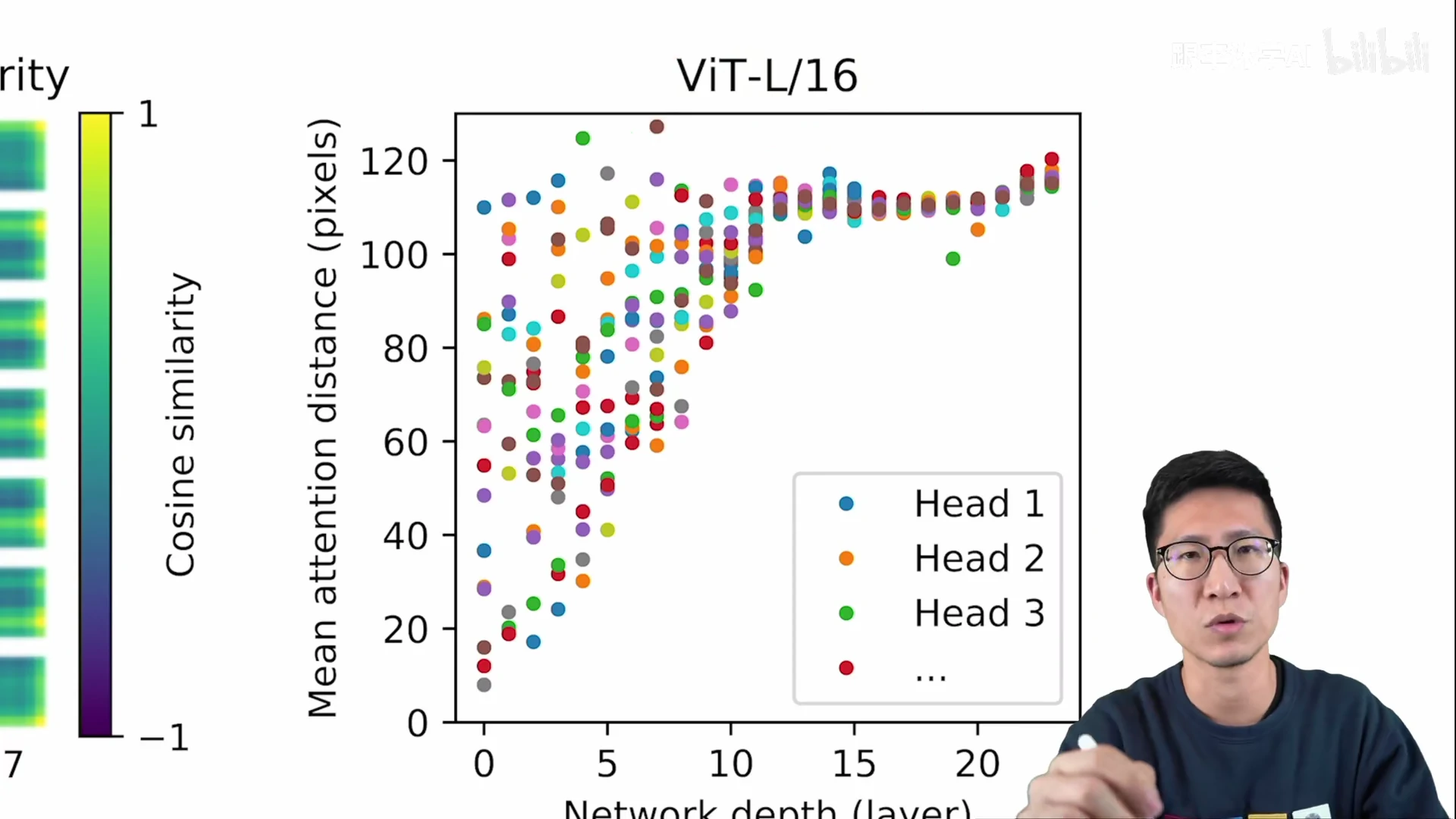
纵轴是 mean attention distance
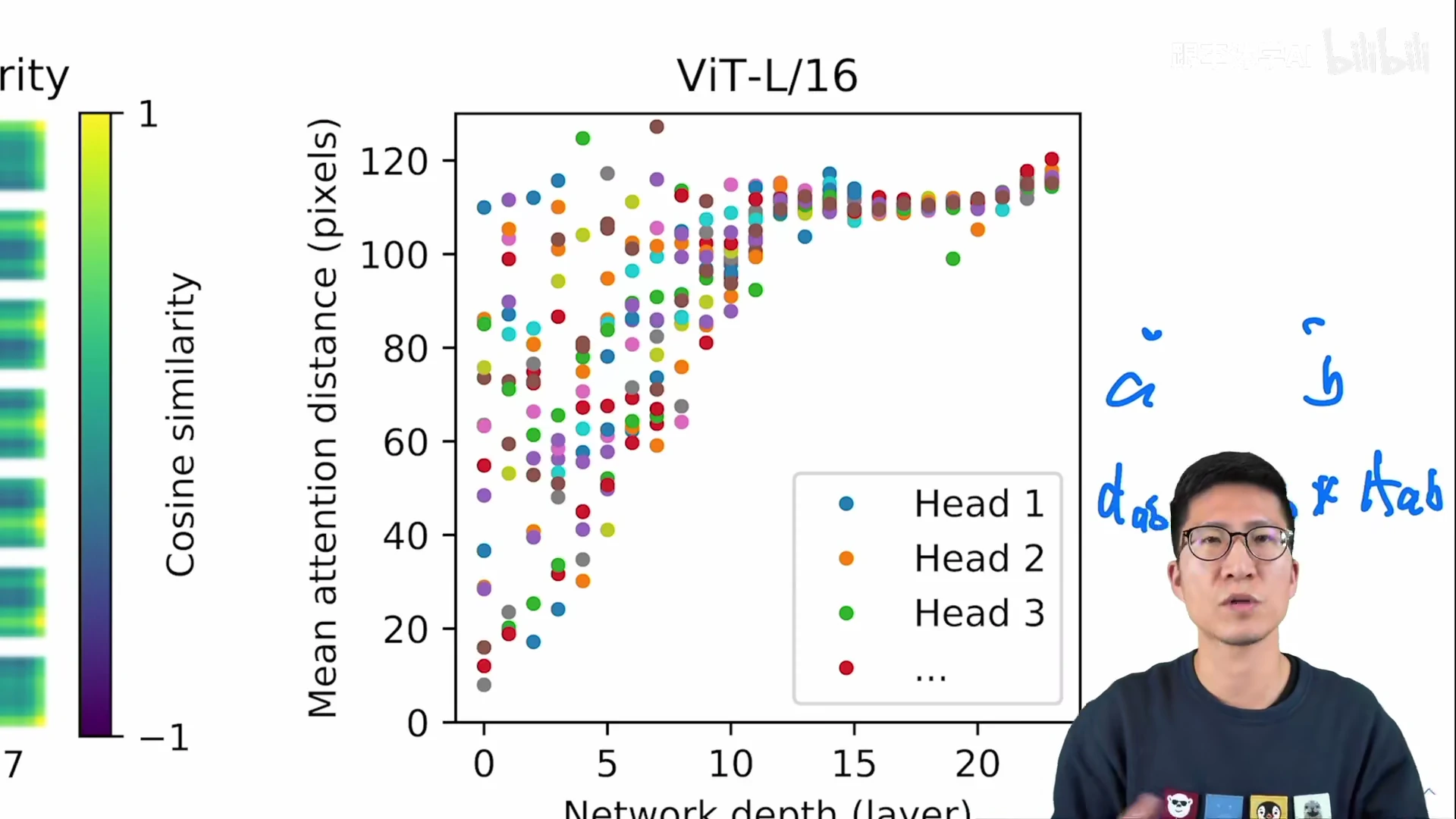
d_ab = l_ab * A_ab = ab 两点 pixel 之间的距离差 * ab 两点之间的attention weights
d_ab 的大小,反映模型能不能注意到很远的 2 个 pixels
- self-attention 刚开始能注意到 10 - 110 pixels
- self-attention 刚开始就注意到全局的信息;CNN 刚开始第一层的感受野 receptive filed 很小,只能看到附近的 pixel
网络加深,模型学到的特征越来越 high level,越来越有语义信息,像素的自注意力距离 越来越远,不是靠邻近的像素点做判断。
证明 自注意力 有学到 很远距离的 pixel 信息,证明 by 图6
ViT 最后一层 output 的 token 的 self-attention 折射(逆向映射)回 原来的输入图片。ViT 真的学到了一些概念:狗、飞机
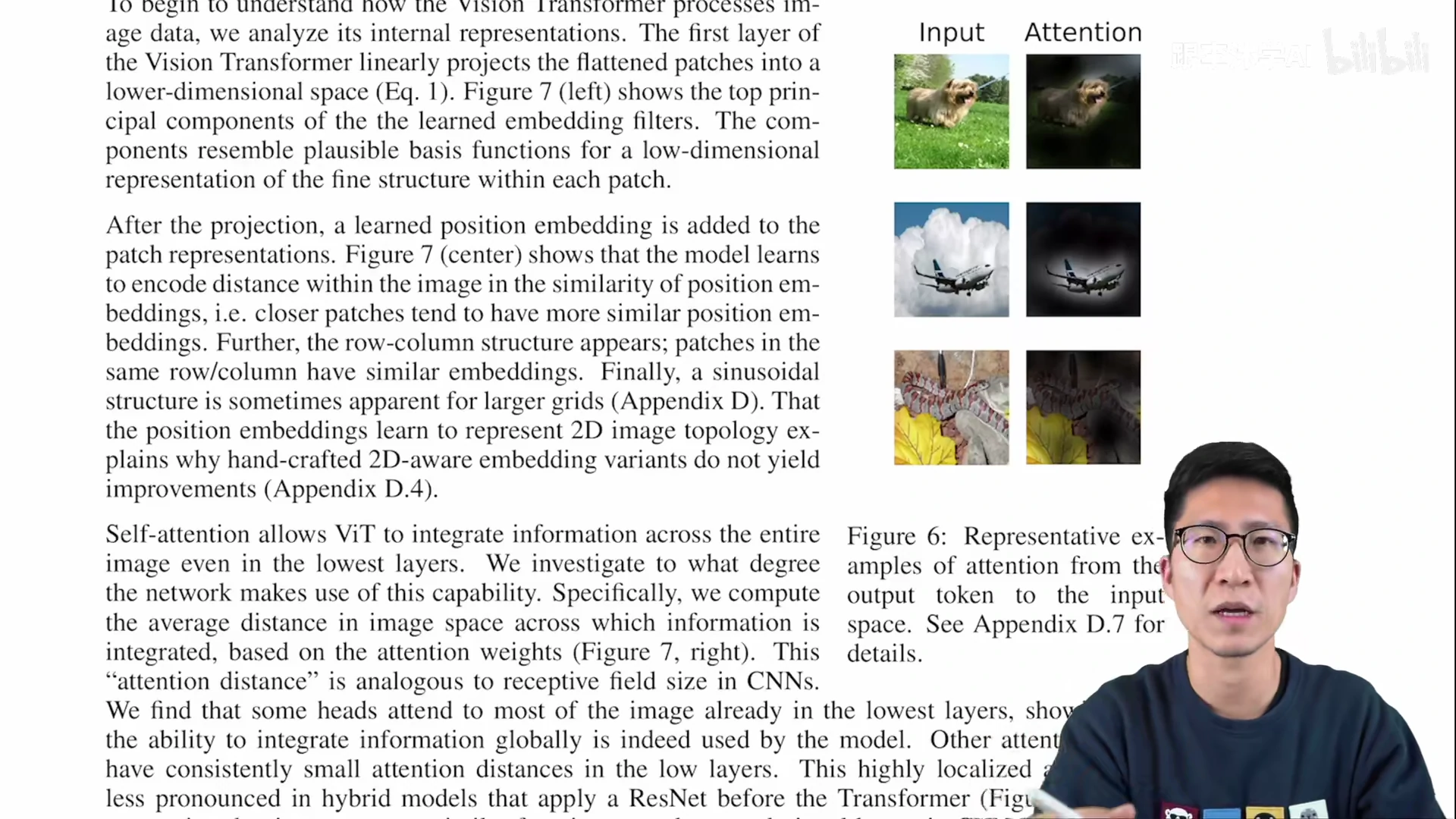
Globally 全局来说,输出的 token 是融合全局的特征信息,ViT 模型可以关注到 和 classfication 分类相关的图像区域。
4.6 self-supervision
如何用 自监督 的方式 训练一个 vision transformer?
很重要,22页全文,别的结果都在 appendix,自监督的结果在正文。
因为 NLP 的 transformer 都是用 large scale self-supervised pre-training 大规模、自监督 的方式预训练的。
NLP 的 自监督:BERT 完形填空 Mask language model,GPT 生成,预测下一个词 by language model
ViT 借鉴 BERT,创建一个专属于 vision 的目标函数,masked patch prediction。一张图片的某些 patches 随机抹掉,ViT 重建缺失的patches
Note:从 模型、目标函数上,CV 和 NLP 的大一统。
但是,ViT-B/16 with masked patch prediction 在 ImageNet 80% 准确率。80% 比 从头训练 ViT 好 2%,比 supervised pre-training 低 4%。
ViT 和 contrastive pre-training 的结合: future work i.e., MOCOv3, DINO
contrastive learning: 2020 年 CV 最火的 topic,是所有 自监督学习方法表现最好的。
评论
写作:简洁明了、有轻有重(重要结果放正文),图表清晰。
内容:Vision Transformer 挖了一个大坑:各个角度的分析,提升 or 推广
task 任务角度:ViT 只做了分类,检测、分割、其它领域的任务 future work
ViT 结构的角度:
- 改刚开始的 tokenization
- 改 transformer block, i.e., self-attention 换成 MLP works
- MetaFormer 认为 transformer work 的原因是 transformer 的架构,不是 transformer 某些特殊的算子
- MetaFormer,self-attention 改成 (不能学习的)pooling 池化操作;甚至改成 Identity,不用注意力
- 改 目标函数:有监督、or 不同的自监督训练方式
ViT 的大坑:
- 打通了 CV 和 LP 之间的鸿沟
- 挖了一个更大的多模态的坑
- 视频、音频、基于 touch 的信号
- 各种 modality 的信号都可以拿来用
CNN, self-attention, MLP 鹿死谁手?
犹未可知,期待下一个改进的 vision transformer
- 一个简洁、高效、通用的视觉骨干网络 CV backbone,甚至完全不用任何标注信息